Device control layer
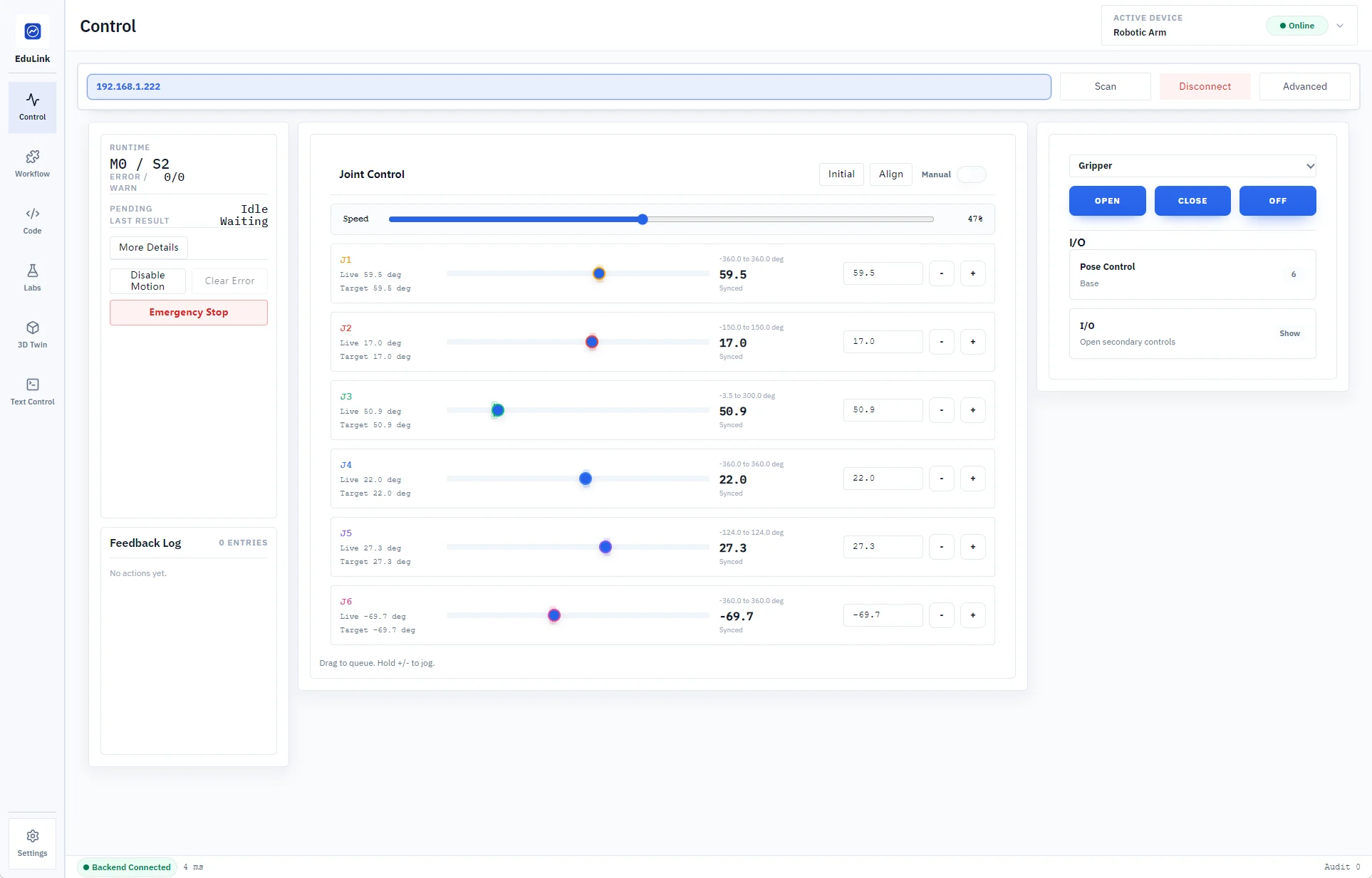
Custom control UI for joint motion, gripper I/O, safety stop, device scanning, online status, and repeatable operation routines.
Software
Custom control UI for joint motion, gripper I/O, safety stop, device scanning, online status, and repeatable operation routines.
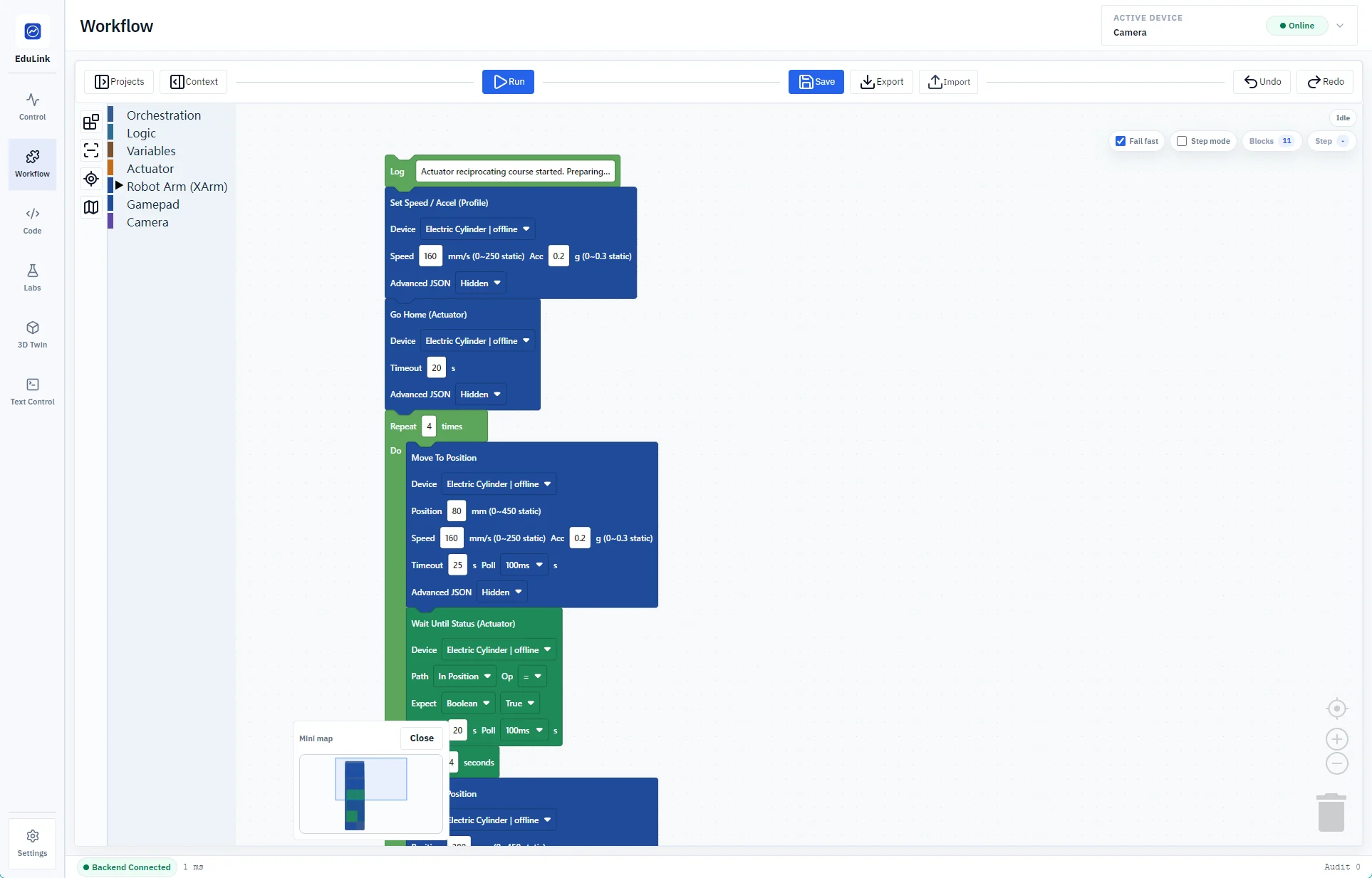
Blockly-style sequencing for actuator profiles, loops, waits, conveyor timing, and client-specific device automation scenarios.
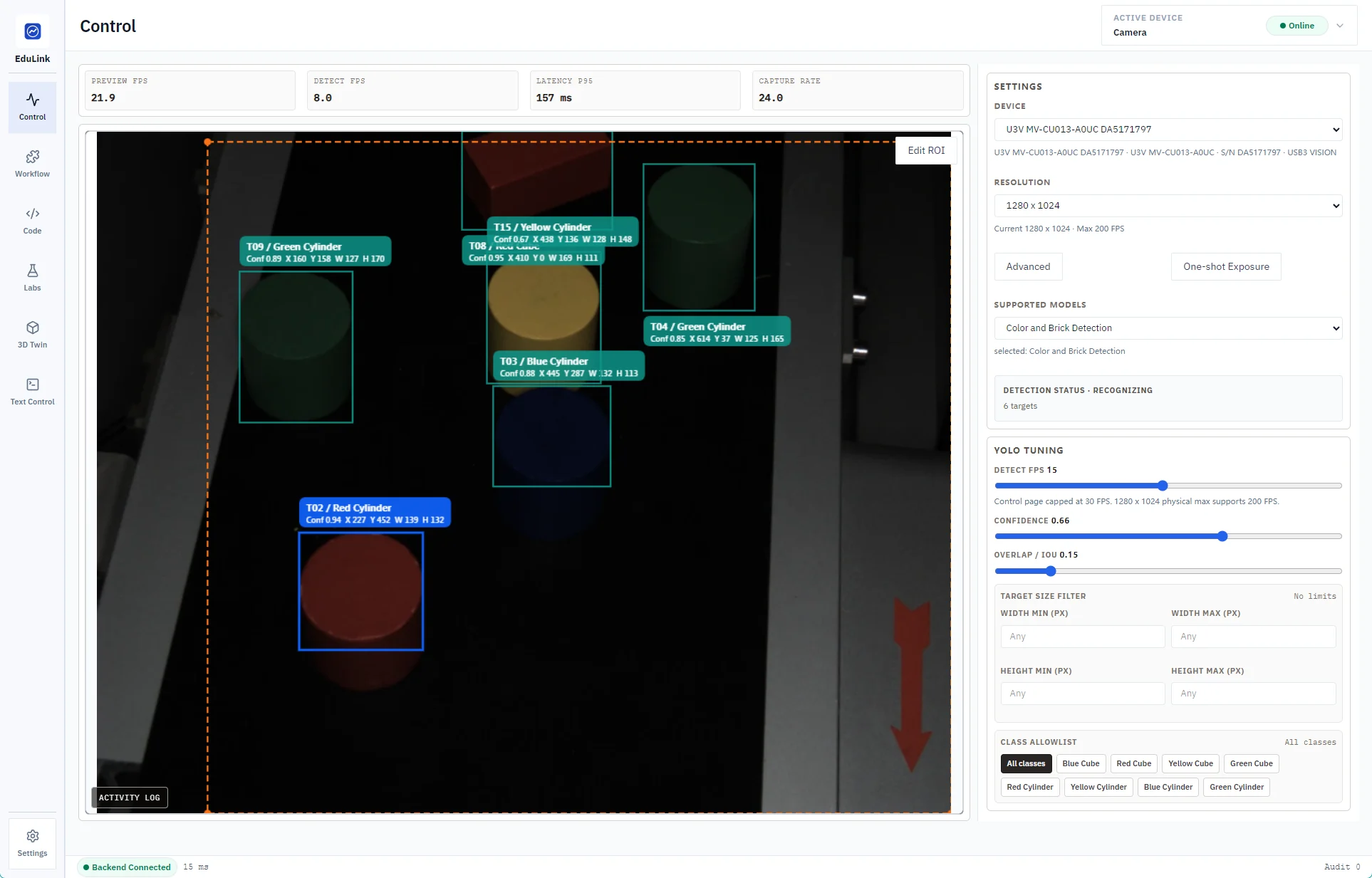
YOLO object detection with ROI, confidence, overlap tuning, class filters, target counts, and live machine-vision labels for project integration.
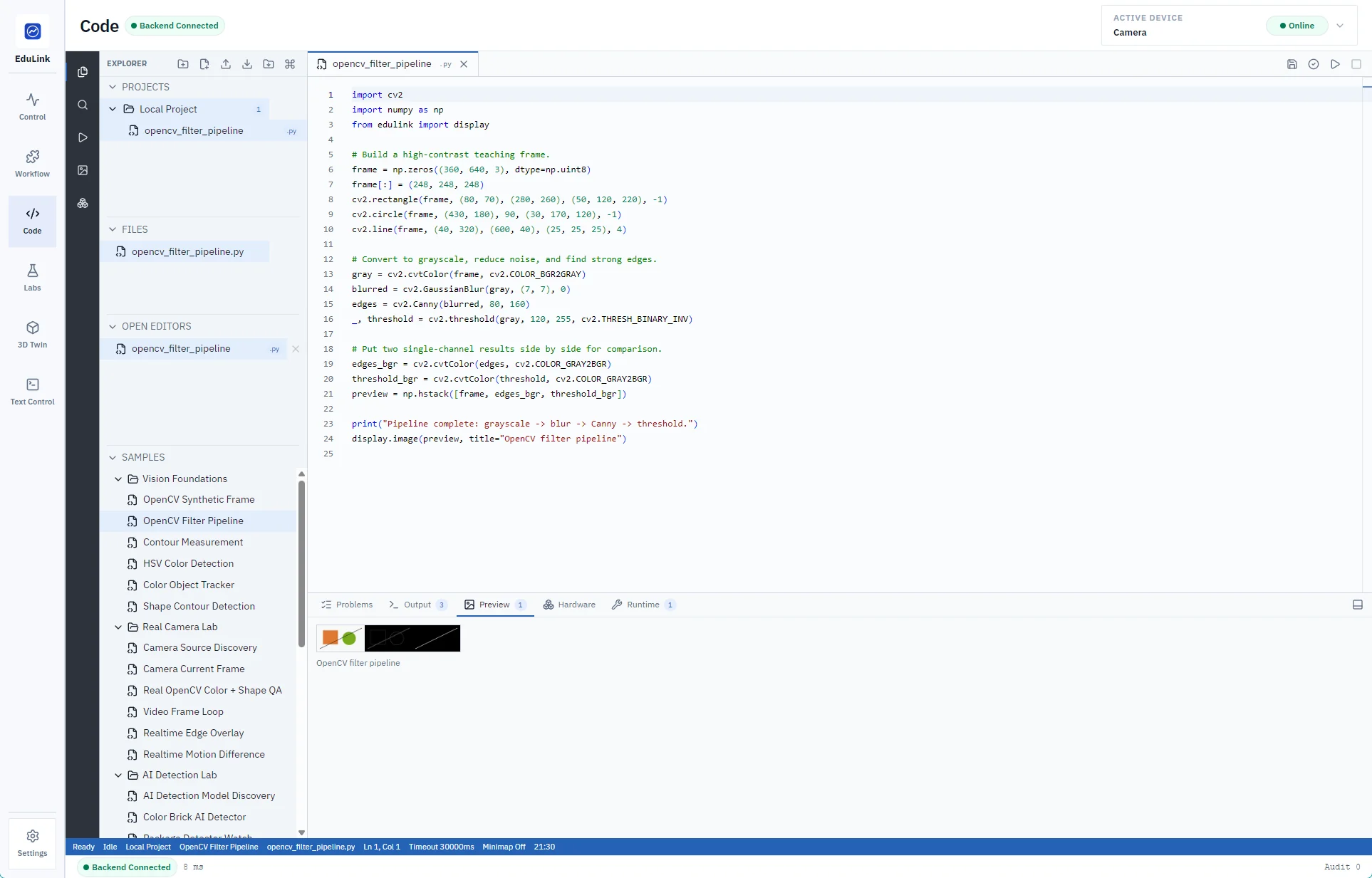
Supports Python vision, OpenCV image processing, and hardware programming for robot arms, actuators, grippers, cameras, and client devices.
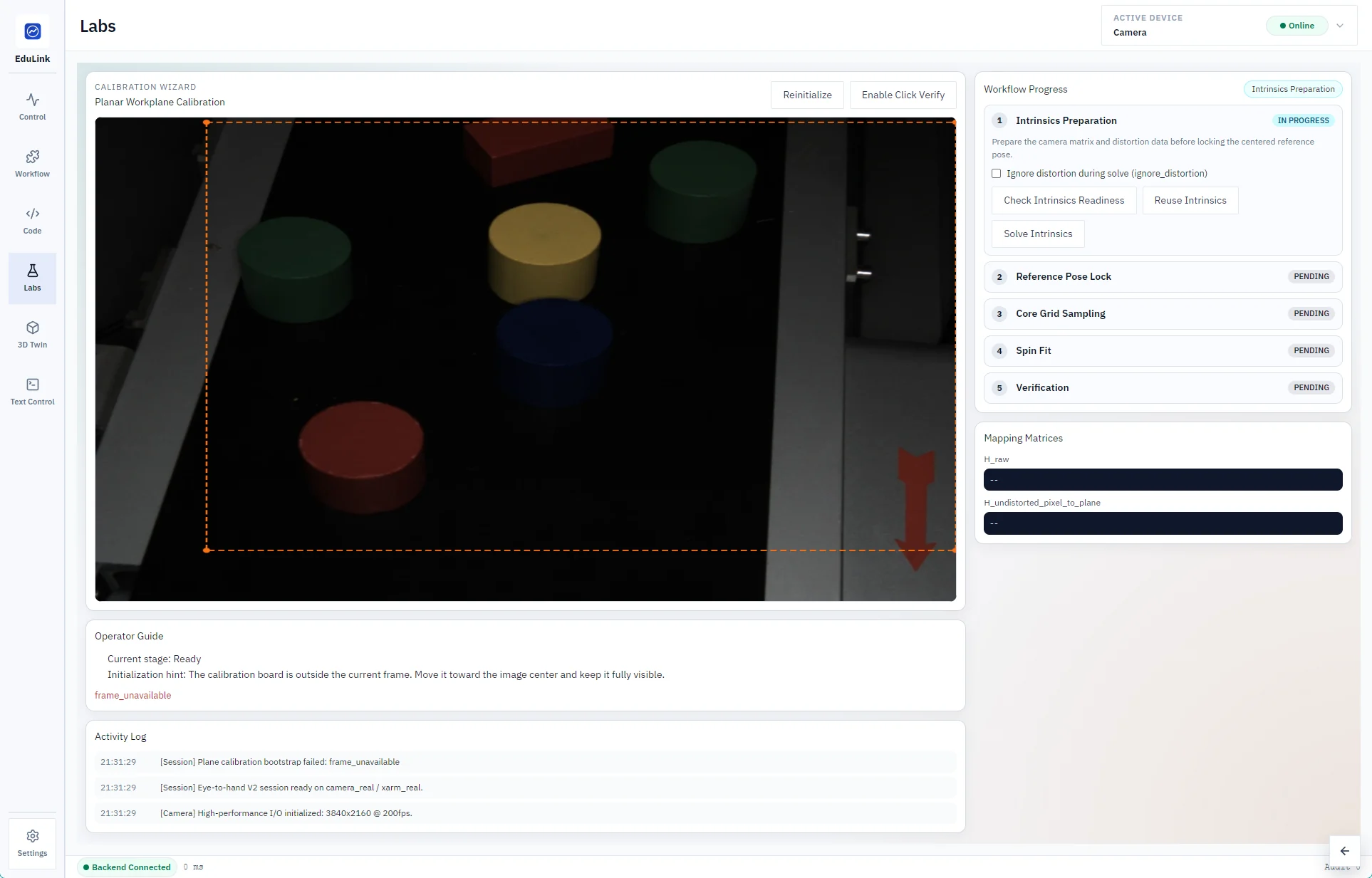
Guided camera and workplane calibration with intrinsics preparation, pose lock, grid sampling, fit, verification, and project-ready feedback.
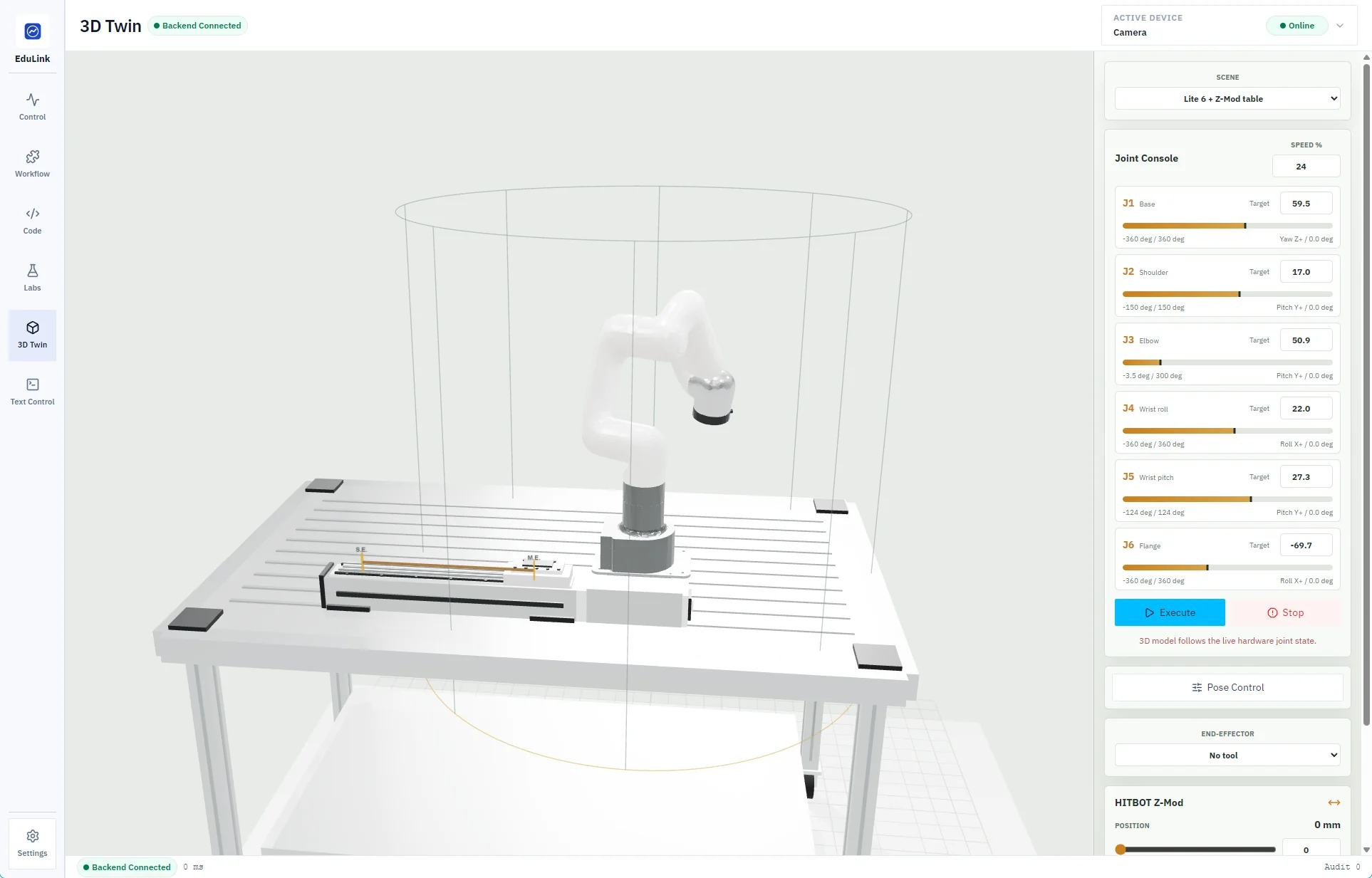
A virtual station mirrors client hardware state for workspace review, path preview, scenario validation, and stakeholder demonstration.