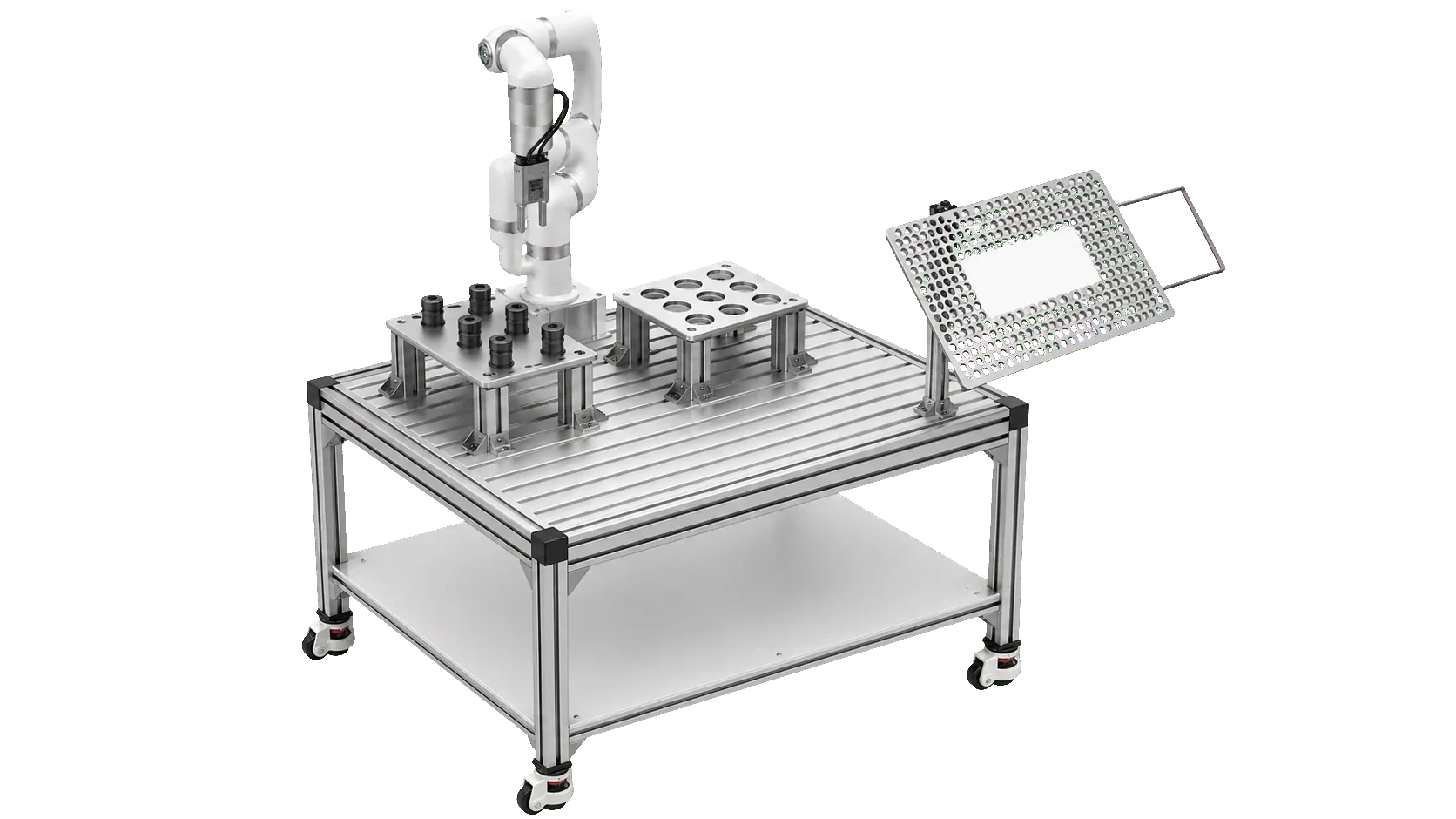
S01 Palletizing OEM Module
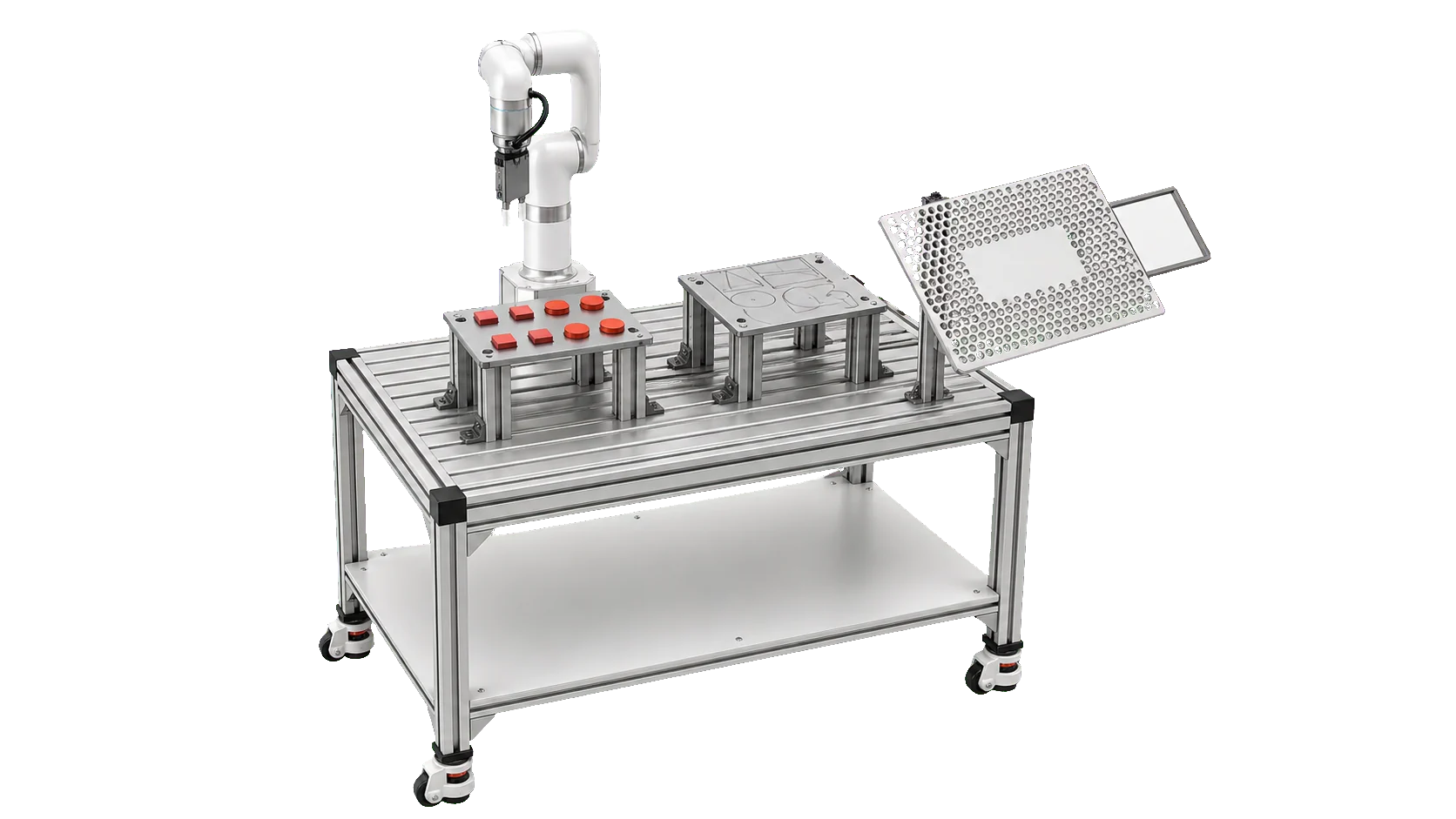
A compact palletizing module for validating gripper tooling, block placement, fixture positioning, tray workflows, and production-flow behavior.
Robot ArmGripperPalletizingOEM Module
View solution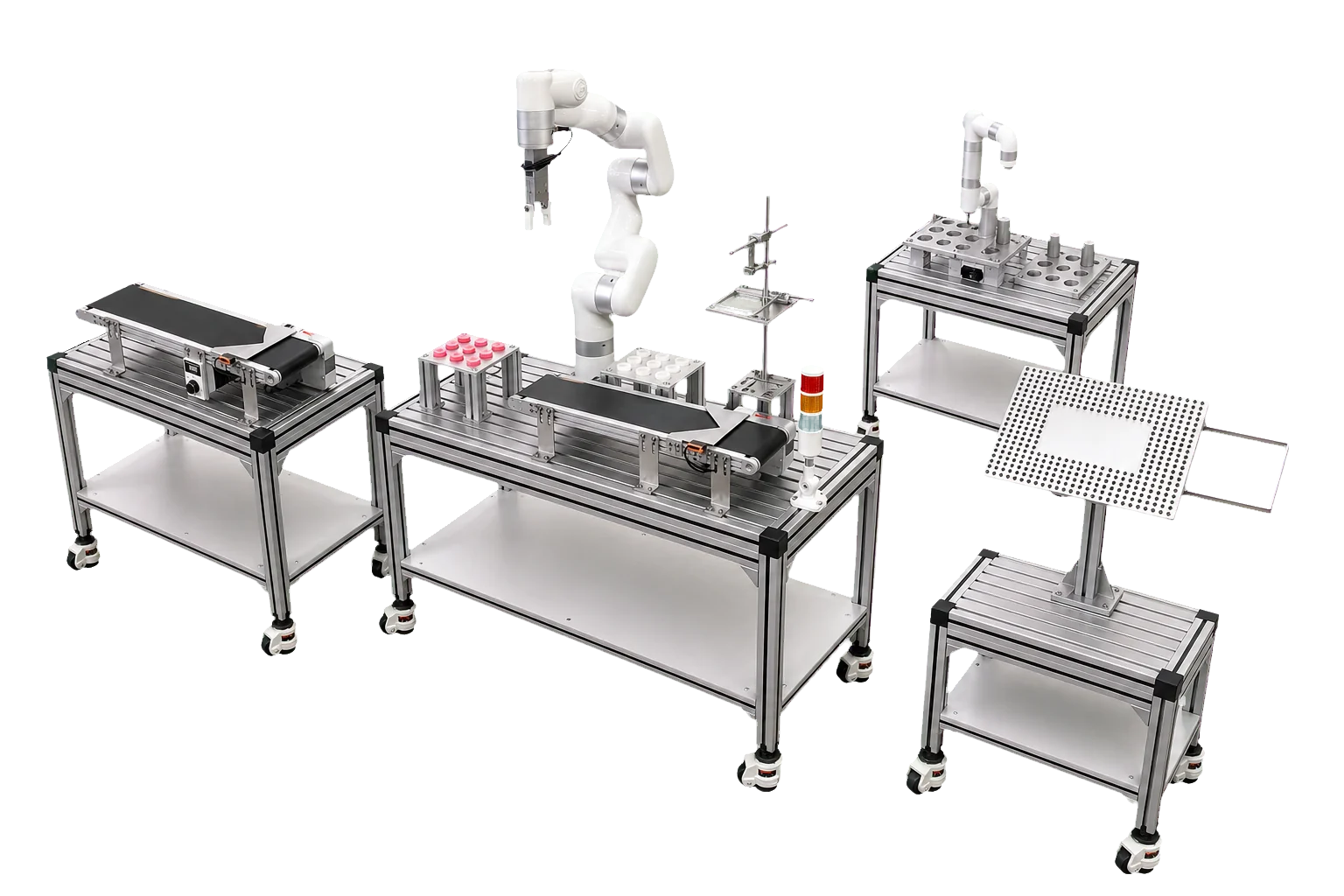
Hardware
A compact palletizing module for validating gripper tooling, block placement, fixture positioning, tray workflows, and production-flow behavior.
Adds conveyor motion for material transfer, sensor timing, sequencing, and robot-conveyor coordination in custom workcell projects.
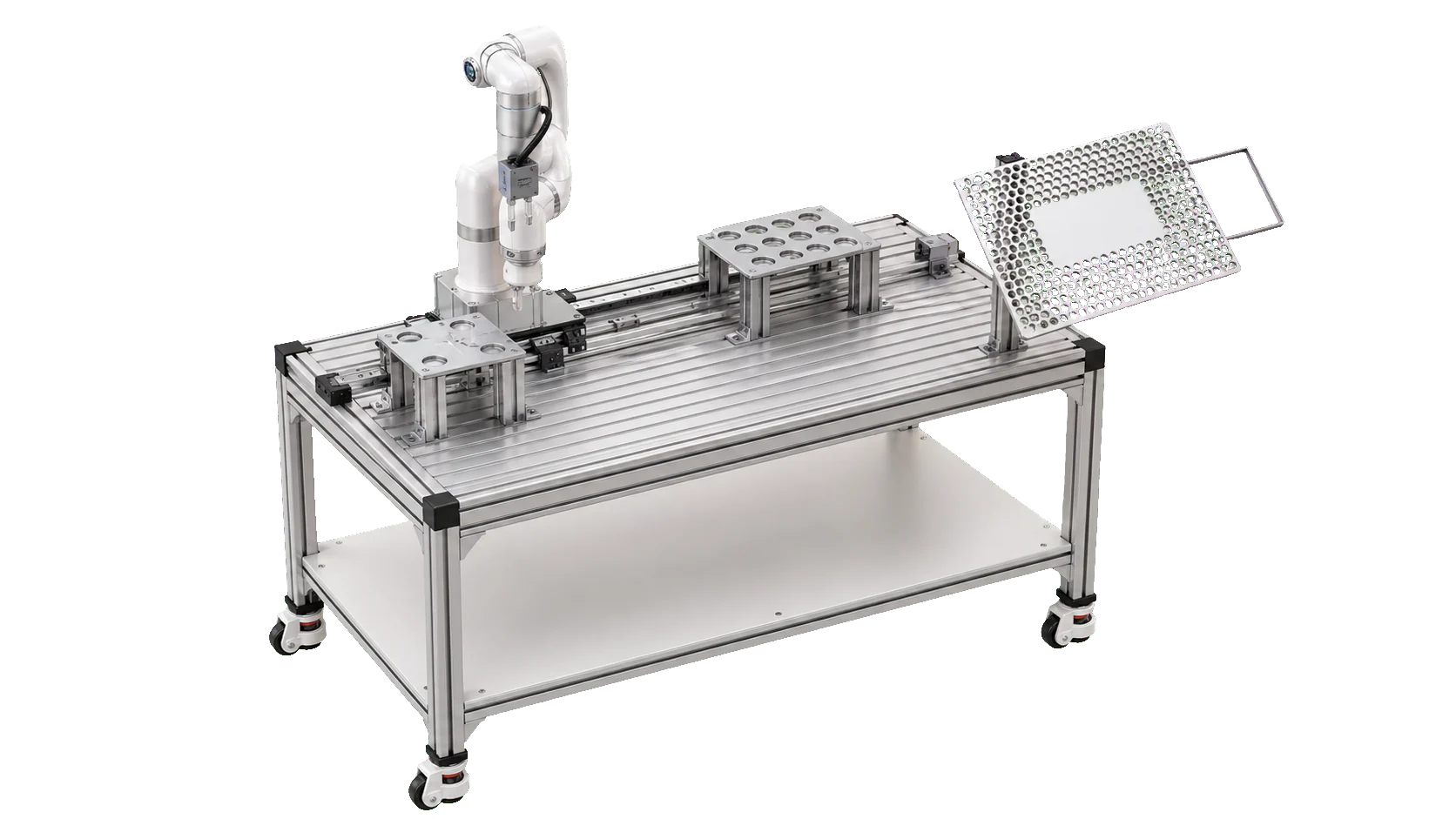
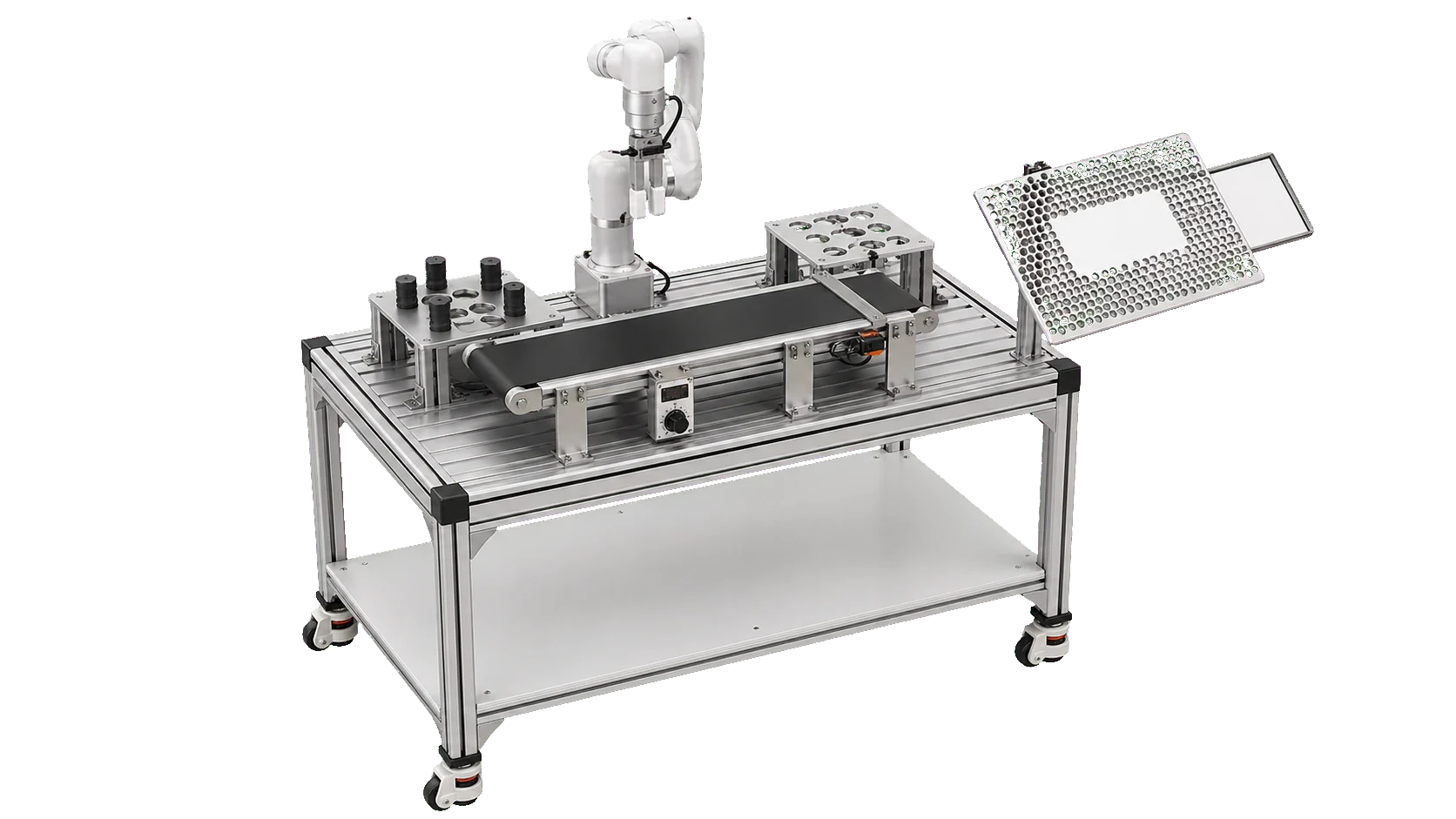
Combines palletizing fixtures with a linear axis for extended reach, multi-position handling, coordinated motion, and compact layout validation.
A pick-and-place module for source-to-target transfer, gripper control, path planning, cycle timing, and project-level debugging.
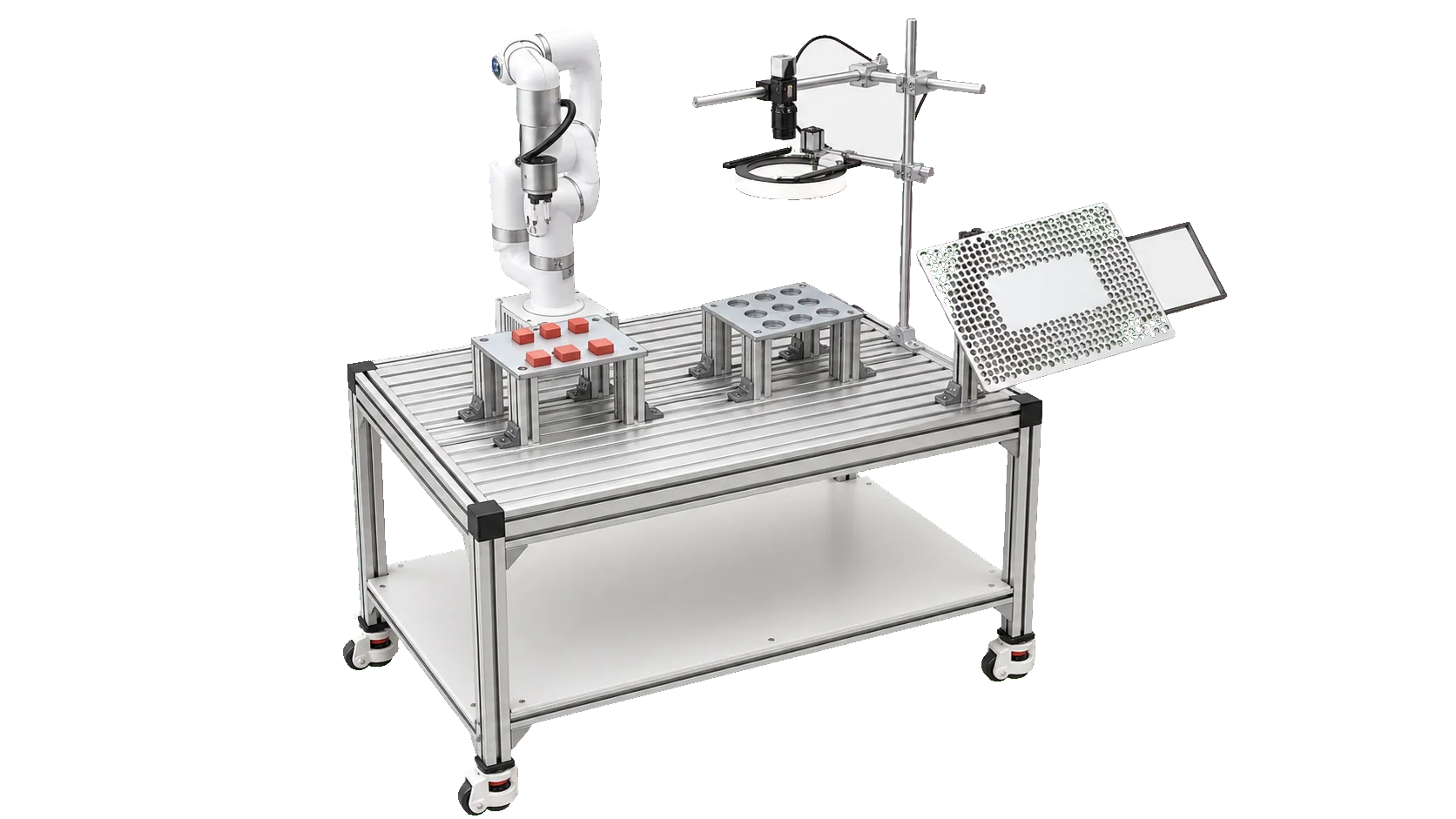
Adds camera, lighting, and target fixtures for YOLO/OpenCV object detection, calibration, machine vision, and inspection integration.
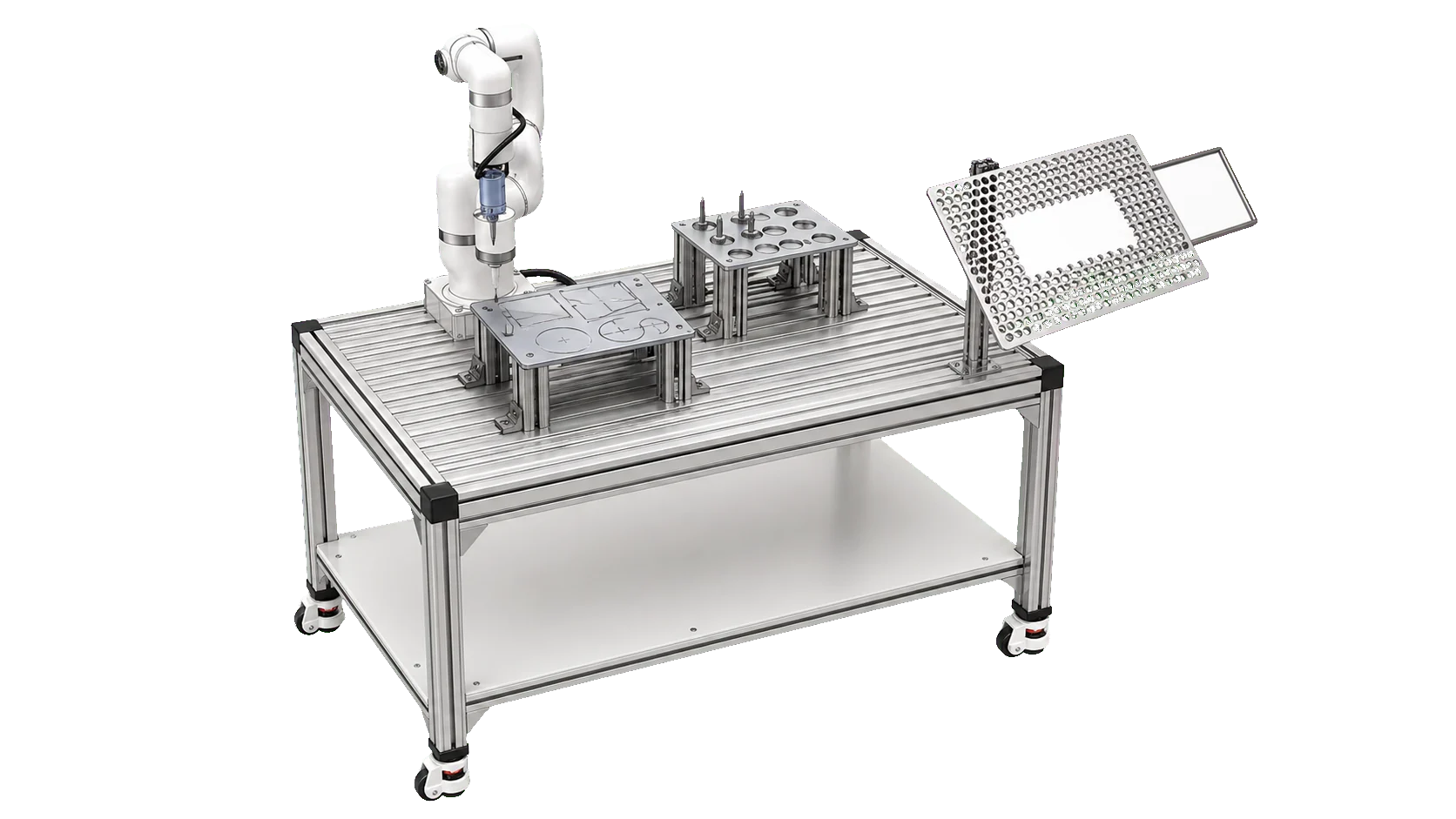
Uses a process-tool workstation and path plate to validate welding, sealing, dispensing, trajectory simulation, and quality-control routines.
Evidence

Actual arm and workstation photos support the product structure and mechanical feasibility.
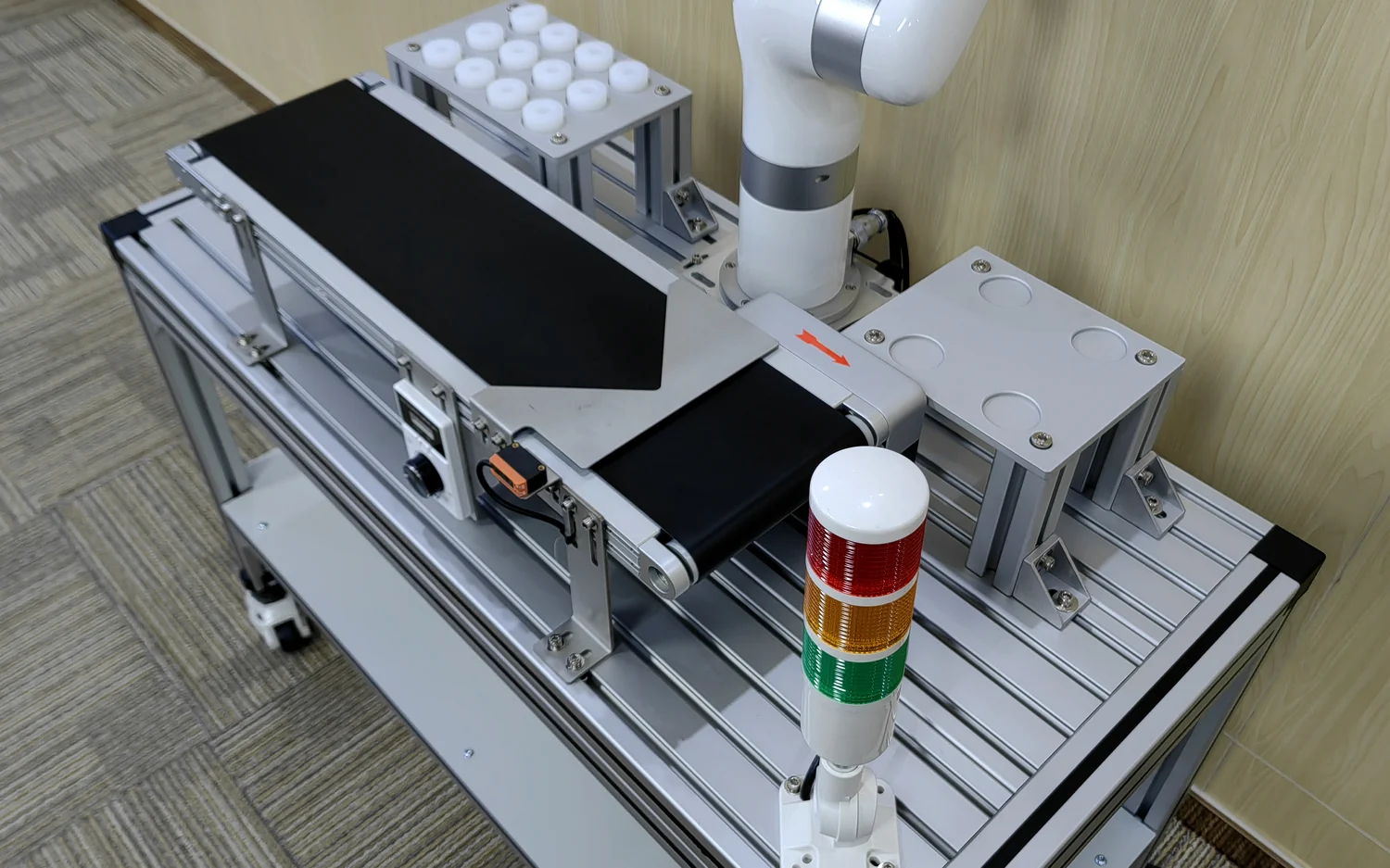
The conveyor and signal tower demonstrate material flow, timing, and process integration.

Custom fixtures show object recognition, camera alignment, and calibration readiness.